本文内容
●
术语
●
产品尺寸和重量
●
工作环境
●
深度相机支持的工作模式
●
彩色相机支持的工作模式
●
深度传感器原始计时
●
相机视场
●
运动传感器(IMU)
●
指示灯
●
设备供电
●
指示灯的含义是什么
●
功耗
●
校准
●
后续步骤
本文详细说明ORBBEC® Femto
Bolt 3D相机产品的规格及部分设计细节,以及供开发者了解和使用相关产品。

术语
整篇文章使用了以下缩写术语。
● NFOV(窄视场深度模式)
● WFOV(宽视场深度模式)
● FOV(视场)
● FPS(每秒帧数)
● IMU(惯性测量单元)
● FoI(专业范围)
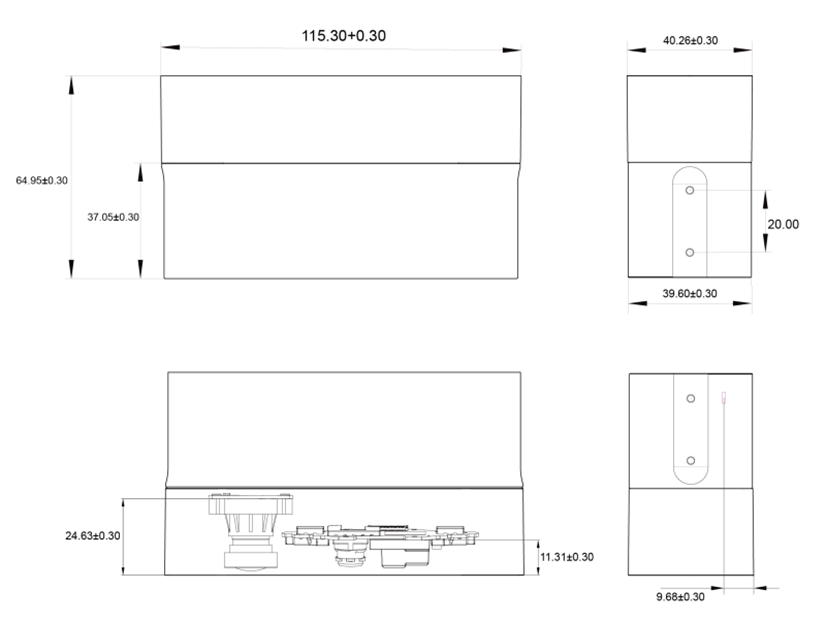
产品尺寸和重量
Femto Bolt 设备的尺寸和重量如下。
● 尺寸:115.30 × 64.95 ×
40.26 mm
● 重量:348g
工作环境
Femto Bolt 适用于在以下环境条件下工作的开发人员和商业单位:
● 温度:10-25℃
● 湿度:8-90%(非冷凝)相对湿度
备注
不符合上述环境条件可能会导致设备出现故障和/或不正常运行。 这些环境条件适用于设备在所有工作条件下运行时的邻近周边环境。
如果配合外部机箱使用,我们建议使用有效的温度控制和/或其他散热解决方案,来确保设备工作条件保持在这些范围内。 本设备在前端型面与后端套管之间设计了一个散热通道。
使用本设备时,请确保不要阻挡此散热通道。
深度相机支持的工作模式
Femto Bolt集成了 1 兆像素时差测距 (ToF) 深度相机。 深度相机支持如下所述的模式:
|
模式 |
解决方法 |
FoI |
FPS |
工作范围* |
曝光时间 |
|
NFOV unbinned |
640x576 |
75°x65° |
5、15、25、30 |
0.5 - 3.86 m |
12.8 ms |
|
NFOV 2x2 binned (SW) |
320x288 |
75°x65° |
5、15、25、30 |
0.5 - 5.46 m |
12.8 ms |
|
WFOV 2x2 binned |
512x512 |
120°x120° |
5、15、25、30 |
0.25 - 2.88 m |
12.8 ms |
|
WFOV unbinned |
1024x1024 |
120°x120° |
5、15 |
0.25 - 2.21 m |
20.3 ms |
|
Passive IR |
1024x1024 |
N/A |
5、15、25、30 |
N/A |
1.6 ms |
* 850nm 时 15% 到 95% 的反射率,2.2 μW/cm2/nm,随机误差标准偏差 ≤ 17 mm,典型系统误差 < 11 mm + 0.1% 的距离(无多路径干扰)。
可以在上面指示的操作范围之外提供深度。 这取决于对象的反射率。
彩色相机支持的工作模式
下面列出了本机工作模式:
|
RGB 相机分辨率 (HxV) |
纵横比 |
格式选项 |
帧速率 (FPS) |
额定 FOV (HxV)(处理后) |
|
3840x2160 |
16:9 |
MJPEG |
5、15、25、30 |
80°x51° |
|
2560x1440 |
16:9 |
MJPEG |
5、15、25、30 |
80°x51° |
|
1920x1080 |
16:9 |
MJPEG |
5、15、25、30 |
80°x51° |
|
1280x720 |
16:9 |
MJPEG/YUY2/NV12 |
5、15、25、30 |
80°x51° |
|
1280x960 |
4:3 |
MJPEG |
5、15、25、30 |
65°x51° |
备注
SDK 能够以 BGRA 像素格式提供彩色图像。 这并非设备支持的本机模式,如果使用,会导致 CPU 负载增大。 主机 CPU 用于转换从设备收到的 MJPEG 图像。
深度传感器原始计时
|
深度模式 |
IR脉冲 |
脉冲宽度 |
空闲周期 |
空闲时间 |
曝光时间 |
|
NFOV Unbinned NFOV 2xx Binned WFOV 2x2 Binned |
9 |
125 us |
8 |
1450 us |
12.8 ms |
|
WFOV Unbinned |
9 |
125 us |
8 |
2390 us |
20.3 ms |
相机视场
下图显示了深度和 RGB 相机视场(传感器“看到”的视角)。
下图显示了 16:9 模式的 RGB 相机。

此图显示了相机在正面 2000 mm 距离的视场。
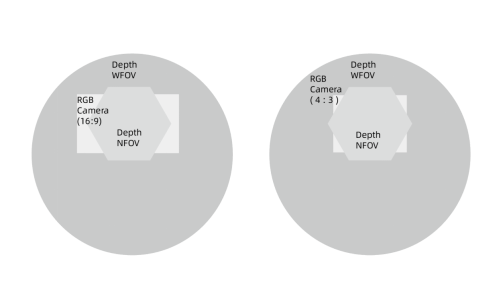
备注
如果深度采用 NFOV 模式,RGB 相机在 16:9 模式下的像素覆盖率优于 4:3 模式。
运动传感器 (IMU)
嵌入式惯性测量单元 (IMU) ,包含加速度传感器和陀螺仪。三轴加速度&三轴角速度,数据格式为 float,采样频率可配置为 50、100、200、500、1000、2000Hz,其中默认采样频率为500Hz。
指示灯
设备正面配备指示灯,指示设备工作状态,默认开启,可以手动设置开关。
设备背面的状态 LED 指示设备状态:
|
指示灯状态 |
表示 |
|
稳定白色 |
设备已打开并正常工作。 |
|
闪烁白色 |
设备已打开,但未建立 USB 3.0 数据连接。 |
|
闪烁橙色 |
设备电量不足,无法正常运行。 |
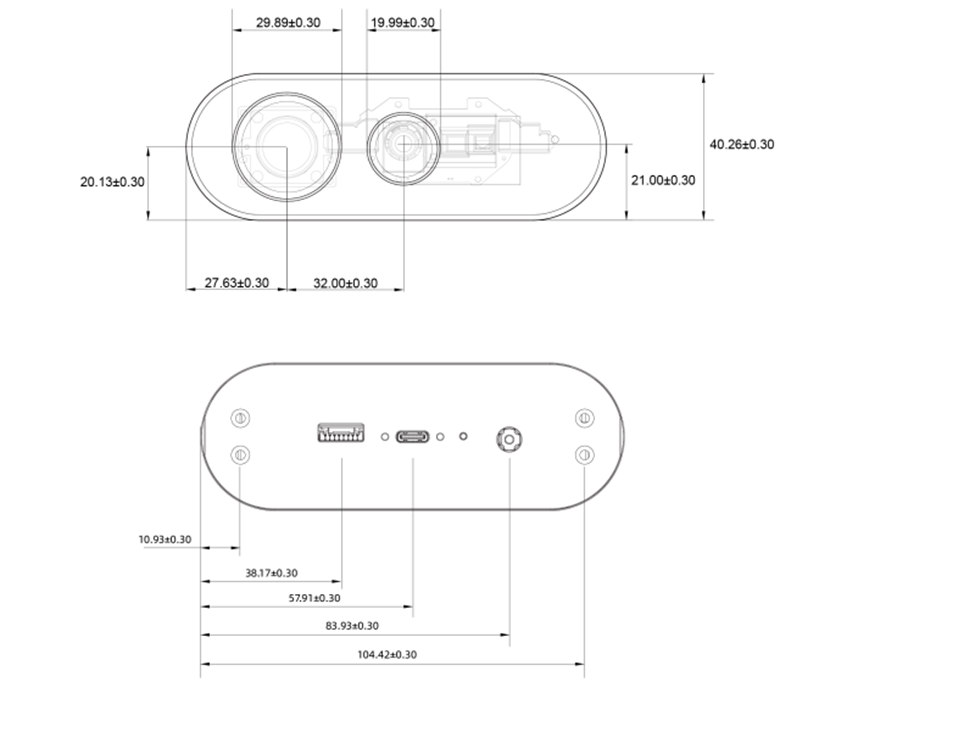
设备供电
可通过两种方式为设备供电:
1. 使用随附的电源。 电源连接器的外径为 5.5 毫米,内径为 2.1 毫米。
2. 使用 Type-C 转 Type-C 线缆供电和传输数据。
Femto Bolt 未随附 Type-C 转 Type-C 线缆。
备注
● 随附的电源线是 USB Type-A 转桶形单柱连接器。 使用此线缆时请结合随附的墙上电源。 两个标准
USB Type-A 端口提供的电量并不足以满足本设备的消耗。
● USB
线缆非常重要,我们建议使用优质线缆,并在远程部署本单元之前验证功能。
提示
选择良好的 Type-C 转 Type-C 线缆:
● USB 认证的线缆必须支持供电和数据传输。
● 无源线缆的长度应小于 1.5 米。 如果更长,请使用有源线缆。
● 线缆至少需要能够支持 1.5A 的电流。 否则,需要连接外部电源。
检查线缆:
● 使用线缆将设备连接到主机电脑。
● 验证所有设备是否在 Windows 设备管理器中正确列出。 深度相机和 RGB 相机应如以下示例中所示列出。
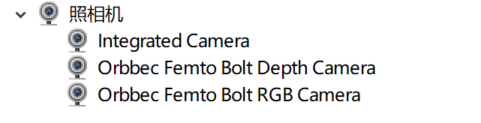
● 在 Femto Bolt 查看器中使用以下设置,验证线缆是否能够可靠地流式传输所有传感器的数据:
○ 深度相机:NFOV unbinned
○ RGB
相机:2160p
○ 启动IMU
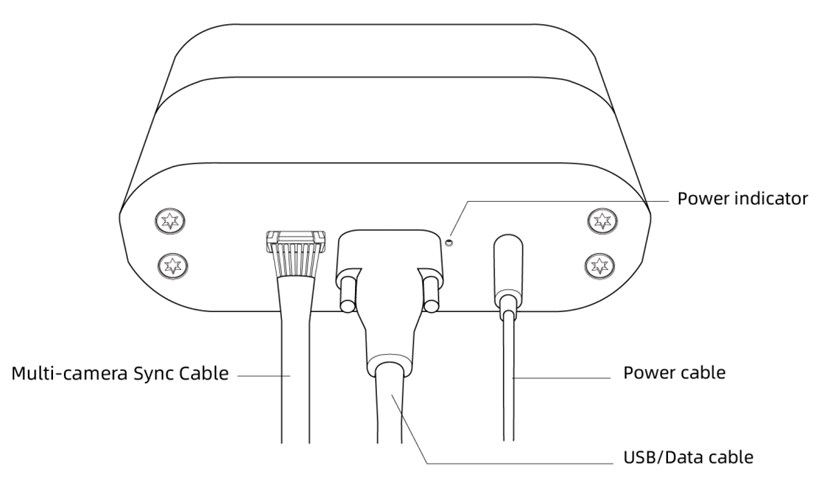
指示灯的含义是什么?
电源指示灯是 Femto Bolt 背面的 LED。 该 LED 的颜色根据设备的状态而变化。
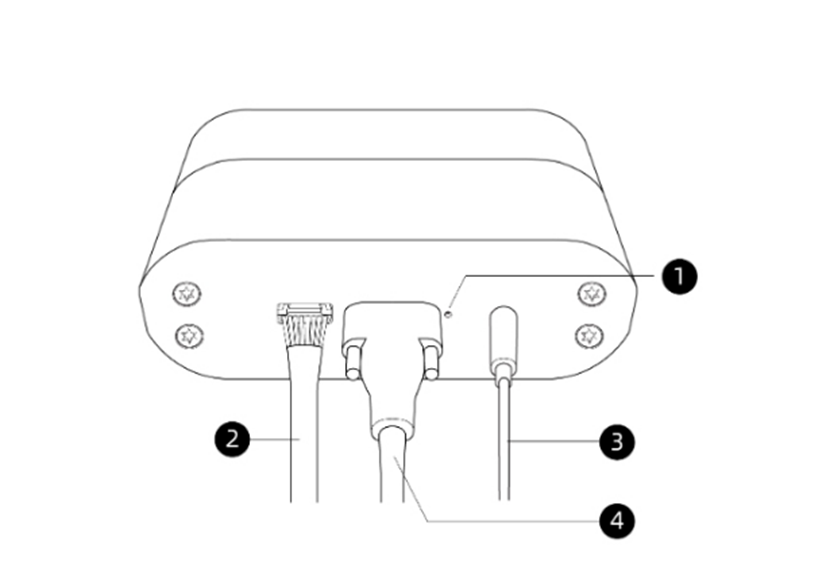
此图标记了以下组件:
1. 电源指示灯
2. 多机同步线(此线不影响电源指示灯状态)
3. 电源线(连接电源)
4. USB-C 数据线(连接电脑)
请确保如图所示连接线缆。 然后,查看下表了解电源指示灯各种状态的含义。
功耗
Femto Bolt 的峰值功耗:DC供电+Type-C 数据传输为 8.7W;Type-C供电+Type-C数据传输为 7.7W,具体的功耗与用例相关。
校准
Femto Bolt 在出厂之前已校准,可通过 Orbbec SDK 和 K4A Wrapper,以编程方式查询视觉传感器和惯性传感器的校准参数。
后续步骤